43. Kernel NIC Interface
The DPDK Kernel NIC Interface (KNI) allows userspace applications access to the Linux* control plane.
The benefits of using the DPDK KNI are:
- Faster than existing Linux TUN/TAP interfaces (by eliminating system calls and copy_to_user()/copy_from_user() operations.
- Allows management of DPDK ports using standard Linux net tools such as ethtool, ifconfig and tcpdump.
- Allows an interface with the kernel network stack.
The components of an application using the DPDK Kernel NIC Interface are shown in Fig. 43.3.
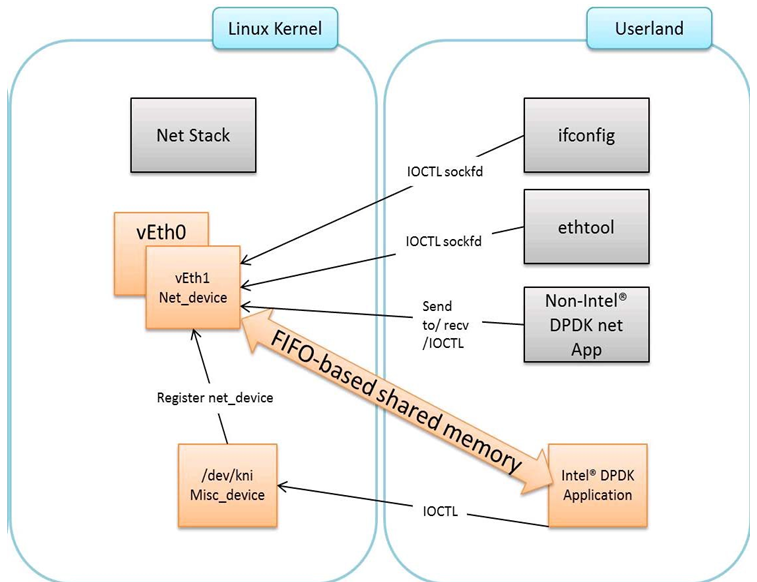
Fig. 43.3 Components of a DPDK KNI Application
43.1. The DPDK KNI Kernel Module
The KNI kernel loadable module rte_kni provides the kernel interface
for DPDK applications.
When the rte_kni module is loaded, it will create a device /dev/kni
that is used by the DPDK KNI API functions to control and communicate with
the kernel module.
The rte_kni kernel module contains several optional parameters which
can be specified when the module is loaded to control its behavior:
# modinfo rte_kni.ko
<snip>
parm: lo_mode: KNI loopback mode (default=lo_mode_none):
lo_mode_none Kernel loopback disabled
lo_mode_fifo Enable kernel loopback with fifo
lo_mode_fifo_skb Enable kernel loopback with fifo and skb buffer
(charp)
parm: kthread_mode: Kernel thread mode (default=single):
single Single kernel thread mode enabled.
multiple Multiple kernel thread mode enabled.
(charp)
parm: carrier: Default carrier state for KNI interface (default=off):
off Interfaces will be created with carrier state set to off.
on Interfaces will be created with carrier state set to on.
(charp)
parm: enable_bifurcated: Enable request processing support for
bifurcated drivers, which means releasing rtnl_lock before calling
userspace callback and supporting async requests (default=off):
on Enable request processing support for bifurcated drivers.
(charp)
parm: min_scheduling_interval: KNI thread min scheduling interval (default=100 microseconds)
(long)
parm: max_scheduling_interval: KNI thread max scheduling interval (default=200 microseconds)
(long)
Loading the rte_kni kernel module without any optional parameters is
the typical way a DPDK application gets packets into and out of the kernel
network stack. Without any parameters, only one kernel thread is created
for all KNI devices for packet receiving in kernel side, loopback mode is
disabled, and the default carrier state of KNI interfaces is set to off.
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko
43.1.1. Loopback Mode
For testing, the rte_kni kernel module can be loaded in loopback mode
by specifying the lo_mode parameter:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko lo_mode=lo_mode_fifo
The lo_mode_fifo loopback option will loop back ring enqueue/dequeue
operations in kernel space.
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko lo_mode=lo_mode_fifo_skb
The lo_mode_fifo_skb loopback option will loop back ring enqueue/dequeue
operations and sk buffer copies in kernel space.
If the lo_mode parameter is not specified, loopback mode is disabled.
43.1.2. Kernel Thread Mode
To provide flexibility of performance, the rte_kni KNI kernel module
can be loaded with the kthread_mode parameter. The rte_kni kernel
module supports two options: “single kernel thread” mode and “multiple
kernel thread” mode.
Single kernel thread mode is enabled as follows:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko kthread_mode=single
This mode will create only one kernel thread for all KNI interfaces to
receive data on the kernel side. By default, this kernel thread is not
bound to any particular core, but the user can set the core affinity for
this kernel thread by setting the core_id and force_bind parameters
in struct rte_kni_conf when the first KNI interface is created:
For optimum performance, the kernel thread should be bound to a core in on the same socket as the DPDK lcores used in the application.
The KNI kernel module can also be configured to start a separate kernel thread for each KNI interface created by the DPDK application. Multiple kernel thread mode is enabled as follows:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko kthread_mode=multiple
This mode will create a separate kernel thread for each KNI interface to
receive data on the kernel side. The core affinity of each kni_thread
kernel thread can be specified by setting the core_id and force_bind
parameters in struct rte_kni_conf when each KNI interface is created.
Multiple kernel thread mode can provide scalable higher performance if sufficient unused cores are available on the host system.
If the kthread_mode parameter is not specified, the “single kernel
thread” mode is used.
43.1.3. Default Carrier State
The default carrier state of KNI interfaces created by the rte_kni
kernel module is controlled via the carrier option when the module
is loaded.
If carrier=off is specified, the kernel module will leave the carrier
state of the interface down when the interface is management enabled.
The DPDK application can set the carrier state of the KNI interface using the
rte_kni_update_link() function. This is useful for DPDK applications
which require that the carrier state of the KNI interface reflect the
actual link state of the corresponding physical NIC port.
If carrier=on is specified, the kernel module will automatically set
the carrier state of the interface to up when the interface is management
enabled. This is useful for DPDK applications which use the KNI interface as
a purely virtual interface that does not correspond to any physical hardware
and do not wish to explicitly set the carrier state of the interface with
rte_kni_update_link(). It is also useful for testing in loopback mode
where the NIC port may not be physically connected to anything.
To set the default carrier state to on:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko carrier=on
To set the default carrier state to off:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko carrier=off
If the carrier parameter is not specified, the default carrier state
of KNI interfaces will be set to off.
43.1.4. Bifurcated Device Support
User callbacks are executed while kernel module holds the rtnl lock, this
causes a deadlock when callbacks run control commands on another Linux kernel
network interface.
Bifurcated devices has kernel network driver part and to prevent deadlock for
them enable_bifurcated is used.
To enable bifurcated device support:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko enable_bifurcated=on
Enabling bifurcated device support releases rtnl lock before calling
callback and locks it back after callback. Also enables asynchronous request to
support callbacks that requires rtnl lock to work (interface down).
43.1.5. KNI Kthread Scheduling
The min_scheduling_interval and max_scheduling_interval parameters
control the rescheduling interval of the KNI kthreads.
This might be useful if we have use cases in which we require improved latency or performance for control plane traffic.
The implementation is backed by Linux High Precision Timers, and uses usleep_range.
Hence, it will have the same granularity constraints as this Linux subsystem.
For Linux High Precision Timers, you can check the following resource: Kernel Timers
To set the min_scheduling_interval to a value of 100 microseconds:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko min_scheduling_interval=100
To set the max_scheduling_interval to a value of 200 microseconds:
# insmod <build_dir>/kernel/linux/kni/rte_kni.ko max_scheduling_interval=200
If the min_scheduling_interval and max_scheduling_interval parameters are
not specified, the default interval limits will be set to 100 and 200 respectively.
43.2. KNI Creation and Deletion
Before any KNI interfaces can be created, the rte_kni kernel module must
be loaded into the kernel and configured with the rte_kni_init() function.
The KNI interfaces are created by a DPDK application dynamically via the
rte_kni_alloc() function.
The struct rte_kni_conf structure contains fields which allow the
user to specify the interface name, set the MTU size, set an explicit or
random MAC address and control the affinity of the kernel Rx thread(s)
(both single and multi-threaded modes).
By default the KNI sample example gets the MTU from the matching device,
and in case of KNI PMD it is derived from mbuf buffer length.
The struct rte_kni_ops structure contains pointers to functions to
handle requests from the rte_kni kernel module. These functions
allow DPDK applications to perform actions when the KNI interfaces are
manipulated by control commands or functions external to the application.
For example, the DPDK application may wish to enabled/disable a physical
NIC port when a user enabled/disables a KNI interface with ip link set
[up|down] dev <ifaceX>. The DPDK application can register a callback for
config_network_if which will be called when the interface management
state changes.
There are currently four callbacks for which the user can register application functions:
config_network_if:
Called when the management state of the KNI interface changes. For example, when the user runsip link set [up|down] dev <ifaceX>.
change_mtu:
Called when the user changes the MTU size of the KNI interface. For example, when the user runsip link set mtu <size> dev <ifaceX>.
config_mac_address:
Called when the user changes the MAC address of the KNI interface. For example, when the user runsip link set address <MAC> dev <ifaceX>. If the user sets this callback function to NULL, but sets theport_idfield to a value other than -1, a default callback handler in the rte_kni librarykni_config_mac_address()will be called which callsrte_eth_dev_default_mac_addr_set()on the specifiedport_id.
config_promiscusity:
Called when the user changes the promiscuity state of the KNI interface. For example, when the user runsip link set promisc [on|off] dev <ifaceX>. If the user sets this callback function to NULL, but sets theport_idfield to a value other than -1, a default callback handler in the rte_kni librarykni_config_promiscusity()will be called which callsrte_eth_promiscuous_<enable|disable>()on the specifiedport_id.
config_allmulticast:
Called when the user changes the allmulticast state of the KNI interface. For example, when the user runsifconfig <ifaceX> [-]allmulti. If the user sets this callback function to NULL, but sets theport_idfield to a value other than -1, a default callback handler in the rte_kni librarykni_config_allmulticast()will be called which callsrte_eth_allmulticast_<enable|disable>()on the specifiedport_id.
In order to run these callbacks, the application must periodically call
the rte_kni_handle_request() function. Any user callback function
registered will be called directly from rte_kni_handle_request() so
care must be taken to prevent deadlock and to not block any DPDK fastpath
tasks. Typically DPDK applications which use these callbacks will need
to create a separate thread or secondary process to periodically call
rte_kni_handle_request().
The KNI interfaces can be deleted by a DPDK application with
rte_kni_release(). All KNI interfaces not explicitly deleted will be
deleted when the /dev/kni device is closed, either explicitly with
rte_kni_close() or when the DPDK application is closed.
43.3. DPDK mbuf Flow
To minimize the amount of DPDK code running in kernel space, the mbuf mempool is managed in userspace only. The kernel module will be aware of mbufs, but all mbuf allocation and free operations will be handled by the DPDK application only.
Fig. 43.4 shows a typical scenario with packets sent in both directions.
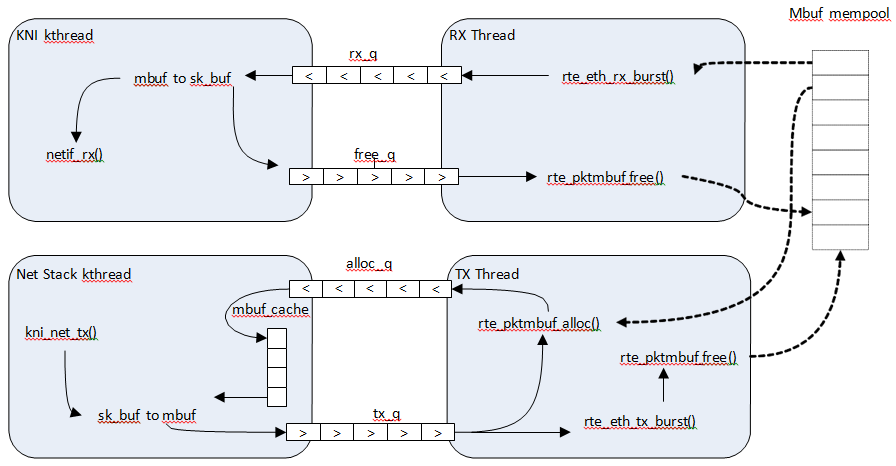
Fig. 43.4 Packet Flow via mbufs in the DPDK KNI
43.4. Use Case: Ingress
On the DPDK RX side, the mbuf is allocated by the PMD in the RX thread context. This thread will enqueue the mbuf in the rx_q FIFO, and the next pointers in mbuf-chain will convert to physical address. The KNI thread will poll all KNI active devices for the rx_q. If an mbuf is dequeued, it will be converted to a sk_buff and sent to the net stack via netif_rx(). The dequeued mbuf must be freed, so the same pointer is sent back in the free_q FIFO, and next pointers must convert back to virtual address if exists before put in the free_q FIFO.
The RX thread, in the same main loop, polls this FIFO and frees the mbuf after dequeuing it. The address conversion of the next pointer is to prevent the chained mbuf in different hugepage segments from causing kernel crash.
43.5. Use Case: Egress
For packet egress the DPDK application must first enqueue several mbufs to create an mbuf cache on the kernel side.
The packet is received from the Linux net stack, by calling the kni_net_tx() callback. The mbuf is dequeued (without waiting due the cache) and filled with data from sk_buff. The sk_buff is then freed and the mbuf sent in the tx_q FIFO.
The DPDK TX thread dequeues the mbuf and sends it to the PMD via rte_eth_tx_burst().
It then puts the mbuf back in the cache.
43.6. IOVA = VA: Support
KNI operates in IOVA_VA scheme when
- LINUX_VERSION_CODE >= KERNEL_VERSION(4, 10, 0) and
- EAL option iova-mode=va is passed or bus IOVA scheme in the DPDK is selected as RTE_IOVA_VA.
Due to IOVA to KVA address translations, based on the KNI use case there can be a performance impact. For mitigation, forcing IOVA to PA via EAL “–iova-mode=pa” option can be used, IOVA_DC bus iommu scheme can also result in IOVA as PA.
43.7. Ethtool
Ethtool is a Linux-specific tool with corresponding support in the kernel. The current version of kni provides minimal ethtool functionality including querying version and link state. It does not support link control, statistics, or dumping device registers.